Satelliitnavigeerimise täpsuse parandamine
Sissejuhatus
Sattelliitnavigeerimise täpsuse parandamiseks kasutatakse kolme tüüpi lisasüsteeme.
Kaasajal (2009.a.) on tegu eelkõige GPS lisasüsteemidega ja räägitakse diferentsiaal GPS süsteemist - DGPS.
Kahel juhul on tegu DGPS süsteemiga, kus on koostöös liikuv (positsioneeriv) GPS vastuvõtja ja statsionaarne vastuvõtja (vastuvõtjad). Statsionaarsed vastuvõtjad teavad oma tegelikku asukohta ja arvutavad erinevuse (diferentsi) oma tegeliku ja positsioneeritud asukoha vahel. Siit ka nimwetus DiferentsiaalGPS. Diferentsiaalsed positsioneerimise parandid tegelike ja positsioneeritud asukohtade põhjal edastatakse ühel või teasel viisil liikuvale GPS vastuvõtjale. Liikuv GPS vastuvõtja kasutab neid parandeid positsioneerimise korrigeerimiseks.
Kolmandal juhul on tegu liikuva vastuvõtja poolse autonoomse satelliitide signaalide täpsuse hindamisega. Seda on võimalik teha, täiendavate satelliitide jälgimise abil (4+1+1), koos vastuvõtjas kasutatavate täienavate algoritmidega, milled abil hinnatakse signaalide täpsust.
DGPS jälgib satelliitide signaale ja hindab nende täpsust.
Kolme täpsuse parandamise süsteemi klassifitseritakse parandusteate edastamise süstemi paiknemise alusel:
- Space Based Augmentation System SBAS (kosmoses paiknev parandussüsteem)
Alternatiivselt Wide Area Augmentation System WAAS - Ground Based Augmentation System GBAS (Maa peal paiknev parandussüsteem)
Alternataiivaselt Local Area Augmentation System LAAS - Air Based Augmentation System ABAS (Õhus paiknev parandussüsteem - lennunduses)
Alternatiivselt Receiver Autonomous Integrity Monitoring RAIM
SBAS (WAAS)
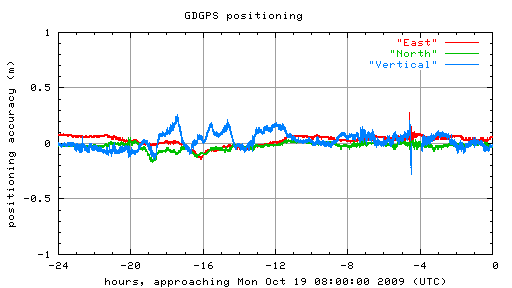
Esimene omalaadne SBAS süsteemi, mis võeti kasutusele USA-s, 2000.a., sai nimeks - Wide Area Augmentation System. WAAS parandab positsioneerimise täpsust kuni 5 korda. Aastal 2000. paranes positsioneerimise täpsus 15 m paremaks, kui 3 m.
Kaasajal on analoogsed SBAS süsteemid olemas Euroopa alal – EGNOS (European Geostationary Navigation Overlay Service), Jaapanis MSAS ja Indias GAGAN.
GBAS süsteem kasutab täiendavalt GNSS geostatsionaarsel orbiidil olevat satelliiti, mis püsib Maa suhtes paigal ja katab kindla Maa-ala. Seega on konkreetne SBAS süsteem toimiv kindlas riigis või riikide grupis. Lennunduses on SBAS puhul sihiks täppislähenemise jaoks sobiva, sertifitseeritud süsteemide väljatöötamine. Kaasajal 2009.a. on käsil EGNOS abil ILS cat-II GPS lähenemise sertifitseerimine.

ATR-42 EGNOS täppislähenemisel Limoges
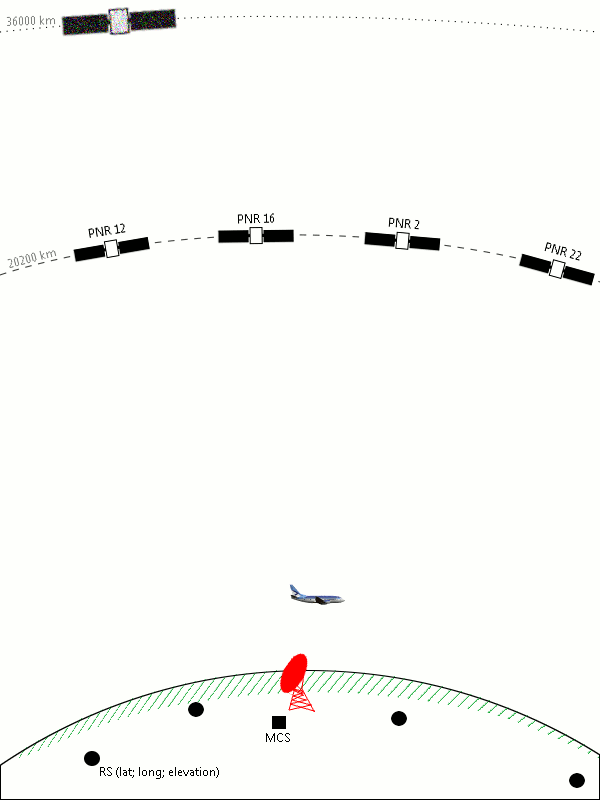
WAAS ülesehitus
Maapealsed referentsjaamade RS (25 tk üle USA) võrk monitoorib nähtavaid GPS satellite. Võrreldakse jaamade teadaolevat asukohta positsioneeritud asukohaga.
Master Control Station MCS (2tk) koguvad monitooringu jaamade andmed ja koostavad GPS parandussõnumi. Parandussõnum arvestab satelliitide orbiitide nihet, kellade nihet js signaali leviku viga läbi ionosääri. Parandussõnum saadetakse up-link jaama abil geostatsionaarsele satelliidile. Geostatsionaarselt satelliidilt saadetakse parandussõnum GPS signaaliga ühilduvas formaadis GPS vastuvõtjatele. WAAS võimeline vastuvõtja suudab seda parandussõnumit lugeda.
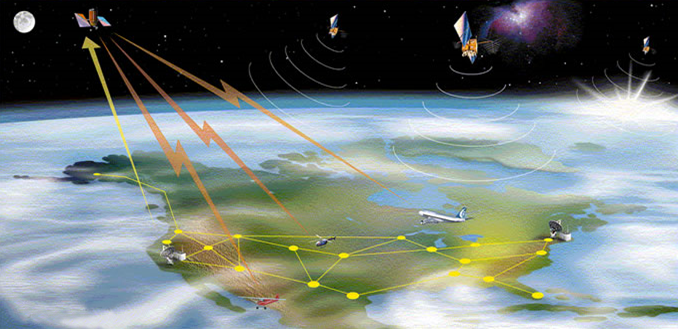
WAAS skeem
GBAS (LAAS)
Kasutatakse lokaalset, teadaolevate koordinaatidega maapealset diferentsiaaljaama, mis positsioneerib end nähtavatelt satelliitidelt. Teadaoleva asukoha ja positsioneeritud asukoha võrdluse põhjal koostatakse parandussõnum nähtavate satelliitide kohta. Lokaalselt, diferentsiaaljaama tööpiirkonnas saab liikuv vastuvõtja parandussõnumi abil oluliselt parandada positsioneerimise täpsust.
LAAS süsteem on laialdaselt kasutusel erinevates tööstus ja tehnoloogia sfäärides. Lennunduses kasutatakse LAAS süsteemi instrumentaallähenemisel, perspektiivis asendada ILS süsteeme. Süsteemi täpsuse kriitilisel vähenemisel annab LAAS hoiatusteate.
LAAS ülesehitus
Fikseeritud asukohas raja lähedal paikneb statsionaarne GPS vastuvõtja (diferentsiaaljaam). Diferentsiaaljaam koostab ja formaadib positsioneerimise andmete põhjal parandussõnumi ning saadab selle läheduses paiknevale maapealsele pseudosatelliidile. Pseudosatelliit saadab parandussõnumi tava GPS signaaliga sarnases formaadis lähenevale lennukile. Pseudosatelliidi tööulatus on ~ 30 ...50 km. Selle signaalil puudub ionsfääri mõju. Vertikaalse ja horisontaalse positsioneerimise täpsus on LAAS kasutamisel cm suurusjärgus.
Interaktiivne satelliitnavigeerimise täpsuse parandamine SBAS süsteemis